Product Description
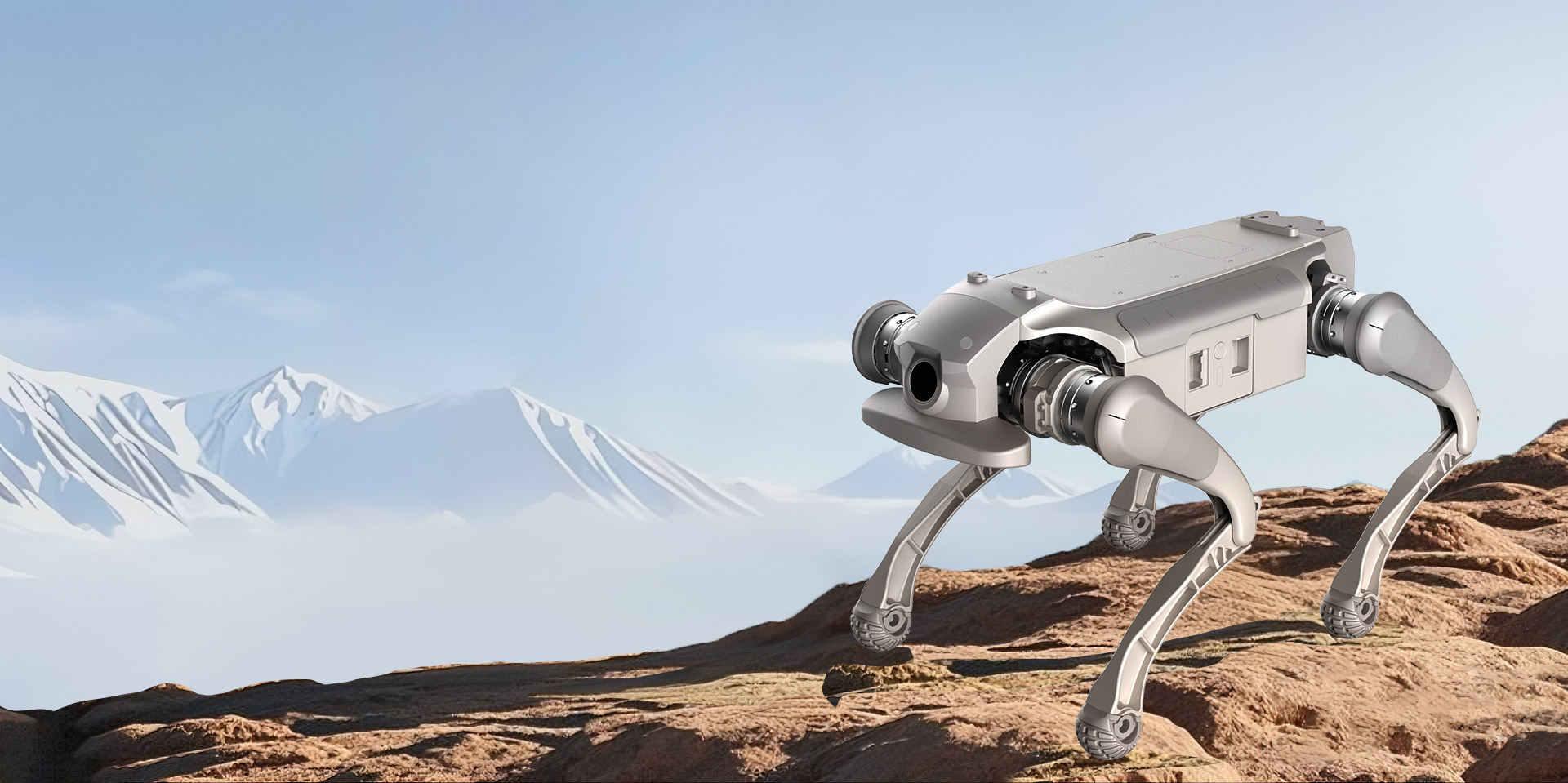
The AGIBOT D1 Ultra is an industrial-grade compact quadruped robot designed for multi-scenario industry applications including emergency response, security inspection, scientific research, and education. Built to IP54 standards with vacuum press-formed aluminum alloy shafts and sealed, anti-corrosion core components, it reliably operates in splashing, damp, muddy, and sandy environments.
Powered by reinforcement learning-based gait control, the D1 Ultra achieves a maximum running speed of 3.7 m/s, handles slopes up to 40°, jumps forward/upward up to 35 cm, and climbs stairs up to 16 cm high — all with self-balancing, anti-tipping, and disturbance rejection capabilities.
Its high-performance joint motors deliver 48 N·m peak torque and 2 kW/kg power density. A dual-encoder controller requires no zero-position calibration, and the impact-resistant design ensures a long module lifespan across intensive operations. Peak output power for the whole machine is approximately 3,500 W.
The D1 Ultra features an open SDK and standardized expansion interfaces (Ethernet, USB, 12V/24V power, SBUS, UART) supporting 3D LiDAR, depth cameras, RTK, 4G/5G modules, and image transmission modules. It supports URDF modeling for simulation in Isaac Sim and MuJoCo, enabling rapid secondary development and multi-scenario deployment.
- Standing Dimensions: 630 mm × 360 mm × 420 mm
- Folded Dimensions: 670 mm × 435 mm × 145 mm
- Maximum Speed: 3.7 m/s (limit ~5 m/s)
- Maximum Slope Angle: 40°
- Forward/Upward Jump Height: 35 cm
- Stair Climbing: up to 16 cm per step (continuous)
- Static Load Capacity: ≈8 kg (limit ~10 kg)
- Unloaded Range (1.8 m/s): 6 km
- Loaded Range (5 kg payload): 4 km
- Protection Level: IP54
- Stable Operating Time in Extreme Environments: 200 h
- Peak Output Power: ~3,500 W
- Joint Motor Peak Torque: ~48 N·m
- Joint Motor Peak Power Density: 2 kW/kg
- Joint Control Mode: Dual encoding (calibration-free)
- Expansion Interfaces: Ethernet, USB, 12V/24V power, SBUS, UART
- Supported Modules: 3D LiDAR, depth camera, RTK, 4G module, image transmission module
- Simulation Support: Isaac Sim, MuJoCo (URDF modeling)
- Gait Control: RL (reinforcement learning)-based
- Application Scenarios: Emergency response, security inspection, education, entertainment